Surgical Robotics Simulation
Helping improve patient safety and healthcare @ SurgicalScience

Professional Experience
Software Developer, Research & Development
Mimic Technologies, Inc. (Surgical Science Sweden AB)June 2021 – Present
I work as a Software Developer on the R&D team at Mimic Technologies, where I build and maintain real-time graphics and simulation systems for high-fidelity robotic surgery training products. My work contributes to engine-level features, training simulation modules, developer tooling, performance improvements, and long-term software maintainability across multiple product lines.
1 Areas of Focus
Real-time graphics & simulation
Engine, tools, and runtime systems
Performance profiling & optimization (CPU/GPU)
Developer workflows (architecture, debugging, CI/CD, code reviews)
Experimentation & R&D in rendering techniques and game engine architectures
2 What I Work On
Developing real-time simulation and rendering systems for surgical training using custom engines and physics frameworks.
Implementing engine-level features, scenario logic, and tooling to support new training modules and product capabilities.
Modernizing and refactoring large legacy C++ codebases to improve performance, stability, and cross-platform support.
Building internal tools and workflows to streamline development, data processing, and production support.
Collaborating with QA, production, and external engineering teams to ensure stable software and hardware integration.
3 Contribution Highlights
Lead engineer for a needle-driving and suturing simulation module, researching soft-body simulation techniques, developing engine-side features, creating scenario behaviors, and collaborating with artists to prepare and integrate art assets.
Updated a legacy C++ simulation engine to ensure compatibility with modern operating systems and enhance its commercial viability.
Migrated a proprietary C++ engine from x86 architecture to x64 architecture, resulting in improved performance, enhanced memory stability, and better development workflows.
Created a high-resolution real-time telemetry pipeline for ML-driven analysis of surgical performance. This product was showcased at an SRS summit.
Developed a database migration tool that automated a complex multi-step workflow, ensuring successful delivery for a major client.
Supported developer workflows by providing technical documentation, engaging in architecture discussions, and conducting code reviews.
Delivered technical presentations during internal developer seminars to educate the team and promote knowledge sharing.
4 Released Products & Modules
I’m excited to share some of the innovative products and dynamic training modules I helped develop as part of our incredible engineering team!
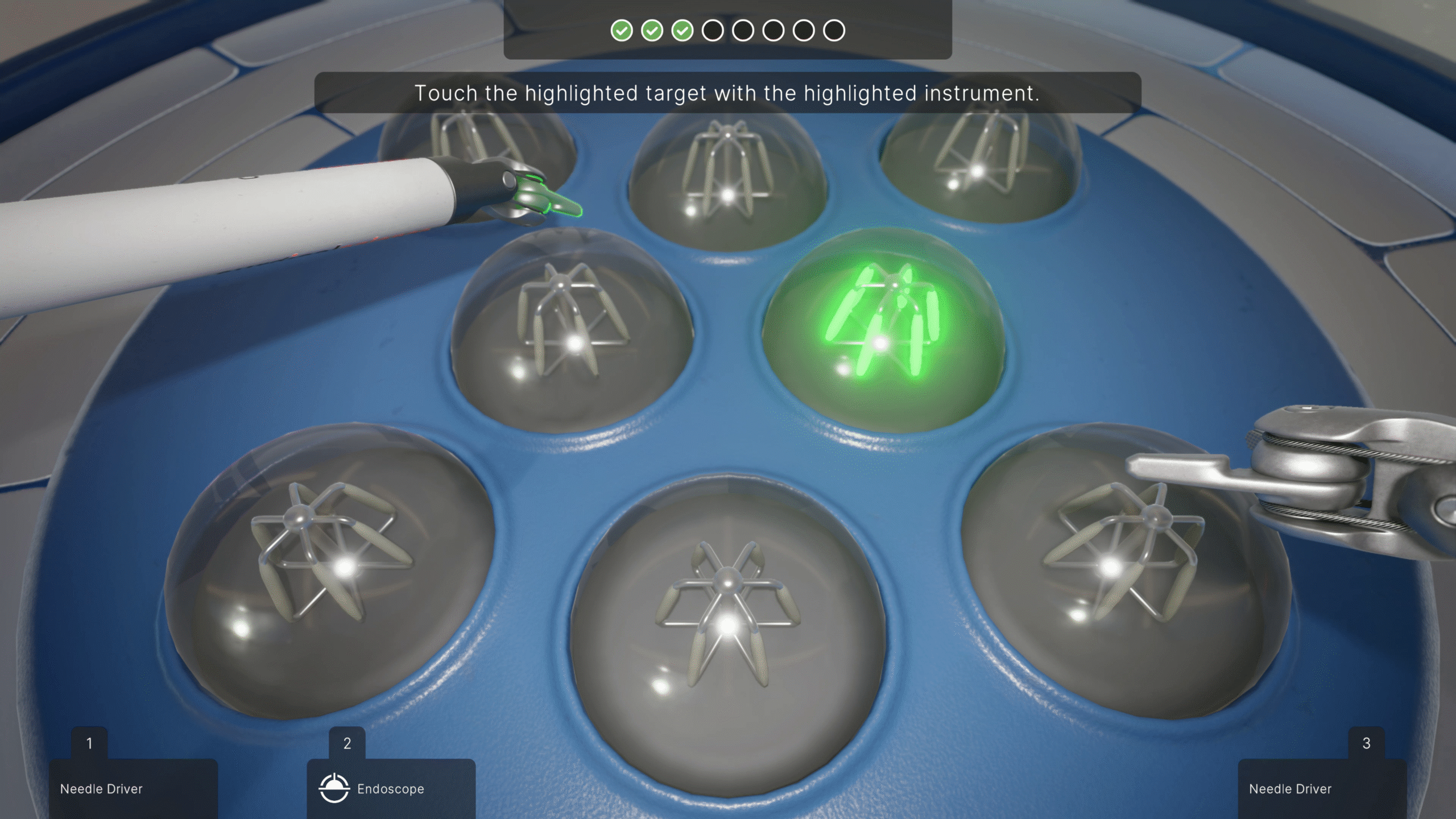
4.1 RobotiX Express
I was part of the incredible team that developed the Unity3D-based simulation software for the RobotiX Express simulator. This project enhances accessibility to robotic surgery training for healthcare professionals.

I had the pleasure of contributing to the Robotic Core Skills Module. Here are some screenshots showcasing the engaging training exercises we created:
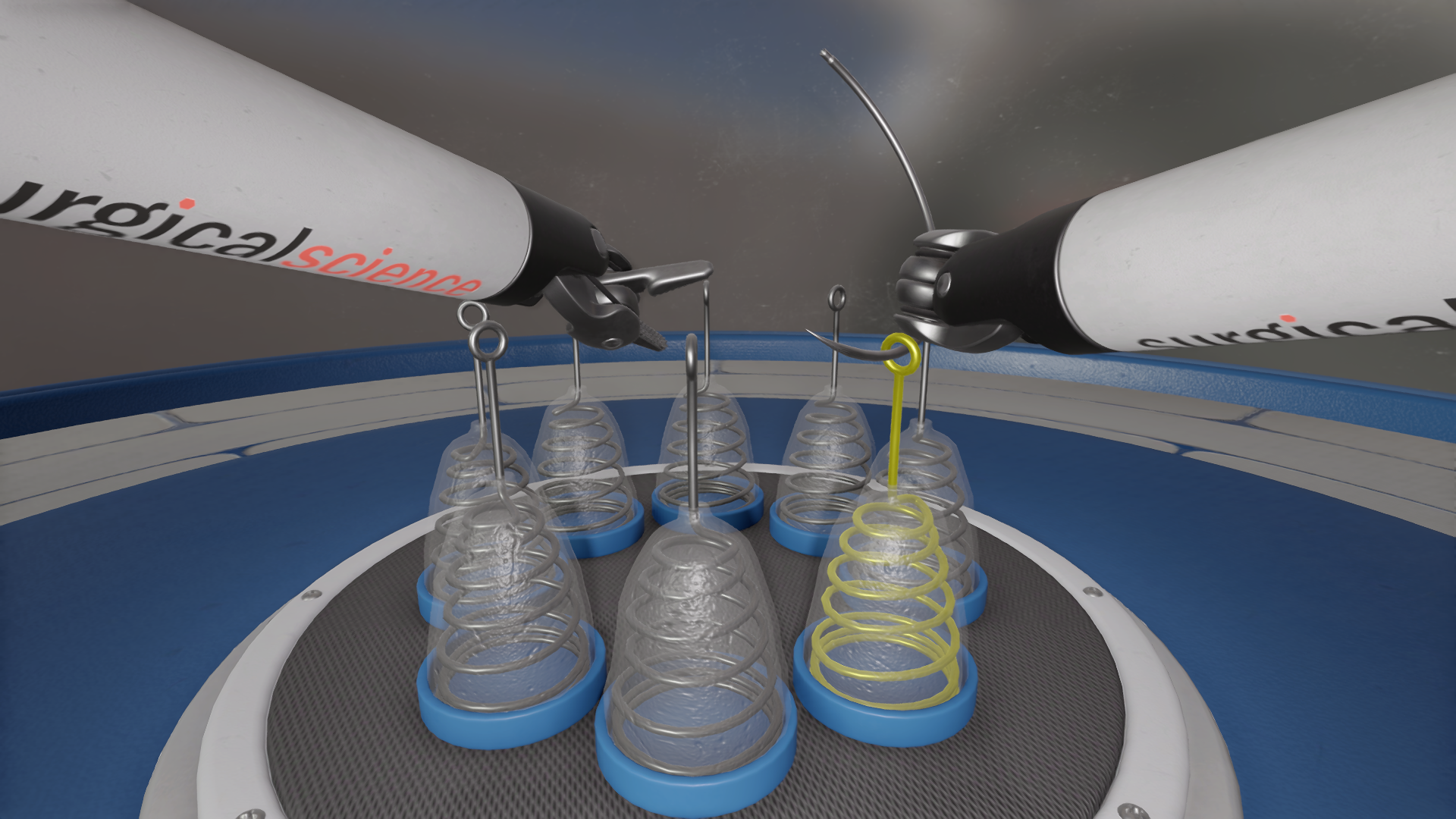
4.2 FlexVR
I contributed to several iterations of the robotic surgery simulation software for the FlexVR platform. This platform is designed to teach both fundamental and advanced robotic surgery skills to a wide audience, including medical students and experienced surgeons. The simulation software is powered by the company’s proprietary surgical simulation engine.
